Creating yor own corner detector
Goal
In this tutorial you will learn how to:
- Use the OpenCV function cv::cornerEigenValsAndVecs to find the eigenvalues and eigenvectors to determine if a pixel is a corner.
- Use the OpenCV function cv::cornerMinEigenVal to find the minimum eigenvalues for corner detection.
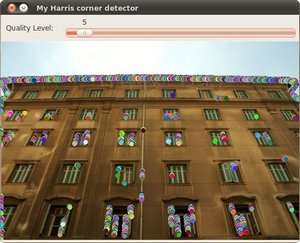
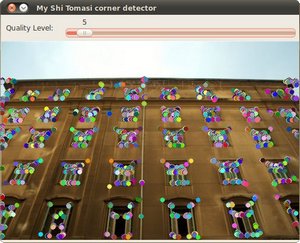
- To implement our own version of the Harris detector as well as the Shi-Tomasi detector, by using the two functions above.
Theory
Code
This tutorial code’s is shown lines below. You can also download it from here
#include "opencv2/imgcodecs.hpp" #include "opencv2/highgui.hpp" #include "opencv2/imgproc.hpp" #include <iostream> using namespace cv; using namespace std; Mat src, src_gray; Mat myHarris_dst; Mat myHarris_copy; Mat Mc; Mat myShiTomasi_dst; Mat myShiTomasi_copy; int myShiTomasi_qualityLevel = 50; int myHarris_qualityLevel = 50; int max_qualityLevel = 100; double myHarris_minVal; double myHarris_maxVal; double myShiTomasi_minVal; double myShiTomasi_maxVal; RNG rng(12345); const char* myHarris_window = "My Harris corner detector"; const char* myShiTomasi_window = "My Shi Tomasi corner detector"; void myShiTomasi_function( int, void* ); void myHarris_function( int, void* ); int main( int, char** argv ) { src = imread( argv[1], IMREAD_COLOR ); cvtColor( src, src_gray, COLOR_BGR2GRAY ); int blockSize = 3; int apertureSize = 3; myHarris_dst = Mat::zeros( src_gray.size(), CV_32FC(6) ); Mc = Mat::zeros( src_gray.size(), CV_32FC1 ); cornerEigenValsAndVecs( src_gray, myHarris_dst, blockSize, apertureSize, BORDER_DEFAULT ); /* calculate Mc */ for( int j = 0; j < src_gray.rows; j++ ) { for( int i = 0; i < src_gray.cols; i++ ) { float lambda_1 = myHarris_dst.at<Vec6f>(j, i)[0]; float lambda_2 = myHarris_dst.at<Vec6f>(j, i)[1]; Mc.at<float>(j,i) = lambda_1*lambda_2 - 0.04f*pow( ( lambda_1 + lambda_2 ), 2 ); } } minMaxLoc( Mc, &myHarris_minVal, &myHarris_maxVal, 0, 0, Mat() ); /* Create Window and Trackbar */ namedWindow( myHarris_window, WINDOW_AUTOSIZE ); createTrackbar( " Quality Level:", myHarris_window, &myHarris_qualityLevel, max_qualityLevel, myHarris_function ); myHarris_function( 0, 0 ); myShiTomasi_dst = Mat::zeros( src_gray.size(), CV_32FC1 ); cornerMinEigenVal( src_gray, myShiTomasi_dst, blockSize, apertureSize, BORDER_DEFAULT ); minMaxLoc( myShiTomasi_dst, &myShiTomasi_minVal, &myShiTomasi_maxVal, 0, 0, Mat() ); /* Create Window and Trackbar */ namedWindow( myShiTomasi_window, WINDOW_AUTOSIZE ); createTrackbar( " Quality Level:", myShiTomasi_window, &myShiTomasi_qualityLevel, max_qualityLevel, myShiTomasi_function ); myShiTomasi_function( 0, 0 ); waitKey(0); return(0); } void myShiTomasi_function( int, void* ) { myShiTomasi_copy = src.clone(); if( myShiTomasi_qualityLevel < 1 ) { myShiTomasi_qualityLevel = 1; } for( int j = 0; j < src_gray.rows; j++ ) { for( int i = 0; i < src_gray.cols; i++ ) { if( myShiTomasi_dst.at<float>(j,i) > myShiTomasi_minVal + ( myShiTomasi_maxVal - myShiTomasi_minVal )*myShiTomasi_qualityLevel/max_qualityLevel ) { circle( myShiTomasi_copy, Point(i,j), 4, Scalar( rng.uniform(0,255), rng.uniform(0,255), rng.uniform(0,255) ), -1, 8, 0 ); } } } imshow( myShiTomasi_window, myShiTomasi_copy ); } void myHarris_function( int, void* ) { myHarris_copy = src.clone(); if( myHarris_qualityLevel < 1 ) { myHarris_qualityLevel = 1; } for( int j = 0; j < src_gray.rows; j++ ) { for( int i = 0; i < src_gray.cols; i++ ) { if( Mc.at<float>(j,i) > myHarris_minVal + ( myHarris_maxVal - myHarris_minVal )*myHarris_qualityLevel/max_qualityLevel ) { circle( myHarris_copy, Point(i,j), 4, Scalar( rng.uniform(0,255), rng.uniform(0,255), rng.uniform(0,255) ), -1, 8, 0 ); } } } imshow( myHarris_window, myHarris_copy ); }
Explanation
Result